相机(Camera)
相机的抽象基类。当我们构建新类型的相机时总是应该继承这个类。
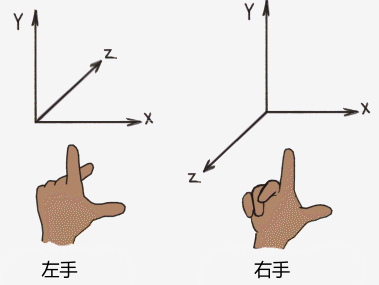
学习Camera之前我们先了解一下THREE.js中使用的坐标系。THREE.js使用的是右手坐标系,想象一下右手握空心拳,手指完全的方向就是从x轴到y轴的方向,而z轴则垂直于手指弯曲的方向从 拳头中心穿过。
查看源码
构造器(Constructor)
Camera()
构造器将初始化如下属性:matrixWorldInverse 和 projectionMatrix.
属性(Properties)
.matrixWorldInverse:Matrix4
这是matrixWorld的逆矩阵。MatrixWorld包含相机的世界变换矩阵。
.projectionMatrix:Matrix4
投影变换矩阵。
.projectionMatrixInverse :Matrix4 projectionMatrix的反转。
.isCamera : Boolean 用于检查此类或派生类是否为摄像机。默认为true。
您不应该更改此内容,因为渲染器在内部使用它进行优化。
.layers : Layers 相机 所属的图层。这是Object3D的继承属性。
在渲染相机的视点时,对象必须与相机共享至少一个图层。
方法(Methods)
- .getWorldDirection ( vector ):Vector3
- vector — (可选)
该方法返回代表相机方向的一个在世界空间中的矢量。
- .lookAt ( vector )
- vector — 观察点
该函数设定相机在全局空间中的位置。
- .clone ( camera ):Vector3
- camera — 要克隆的相机
返回一个相机的克隆。
- .copy(source:Camera,recursive:Boolean):Camera 将源摄像头中的属性复制到此摄像头中。
three.js中相机分为立方体相机(CubeCamera)、正交相机(OrthographicCamera)和透视相机(PerspectiveCamera)
我们先从上面的两种图来理解正交投影与透视投影,我觉得我们可以把正交投影理解为到面的投影,投影线垂直于投影面进行投影,因此物体投影之后的比例是保持不变的。而对于透视 投影我们可以理解为到点的投影,所有的投影线最后都将汇聚于一点,透视投影的特点就是近大远小。
立方体相机(CubeCamera)
创建6个摄像机,并将它们所拍摄的场景渲染到WebGL渲染器立方体目标(WebGLRenderTargetCube)上。
查看源码
// Create cube camera
var cubeCamera = new THREE.CubeCamera( 1, 100000, 128 );
scene.add( cubeCamera );
// Create car
var chromeMaterial = new THREE.MeshLambertMaterial( { color: 0xffffff, envMap: cubeCamera.renderTarget } );
var car = new Mesh( carGeometry, chromeMaterial );
scene.add( car );
// Update the render target cube
car.setVisible( false );
cubeCamera.position.copy( car.position );
cubeCamera.update( renderer, scene );
// Render the scene
car.setVisible( true );
renderer.render( scene, camera );
构造器(Constructor)
CubeCamera( near : Number, far : Number, cubeResolution : Number )
- near -- 远剪切面的距离
- far -- 近剪切面的距离
- cubeResolution -- 设置立方体边缘的长度
构造一个包含6个PerspectiveCameras(透视摄像机)的立方摄像机,并将其拍摄的场景渲染到一个WebGLRenderTargetCube上。
属性(Properties)
请参阅其基类Object3D来查看共有属性。
.renderTarget : WebGLRenderTargetCube
生成的立方体纹理,生成的立方体纹理保存在其中的.texture对象中,可作为贴图赋值给其他材质
方法(Methods)
请参阅其基类Object3D来查看其共有方法。
.update ( renderer : WebGLRenderer, scene : Scene ) : null
- renderer -- 当前的WebGL渲染器
- scene -- 当前的场景
这个方法用来更新renderTarget(渲染目标对象)。
.clear ( renderer : WebGLRenderer, color : Boolean, depth : Boolean, stencil : Boolean ) : null
这个方法用来来清除renderTarget的颜色、深度和/或模板缓冲区。 颜色缓冲区设置为渲染器当前的“清除”色。参数默认值均为true。
正交相机(OrthographicCamera)
这一摄像机使用orthographic projection(正交投影)来进行投影。
查看源码
在这种投影模式下,无论物体距离相机距离远或者近,在最终渲染的图片中物体的大小都保持不变。
这对于渲染2D场景或者UI元素是非常有用的。
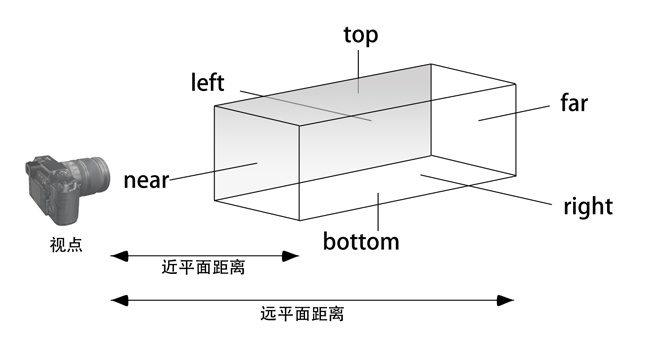
在上面正交投影的图中,我们想象一样,相机所在的地方有个平面,而相机所在的地点默认是平面的中心点。 那么:left就是视锥左侧面,right就是视锥右侧面,top就是视锥上侧面,而bottom就是视锥下侧面。 near是到距离相机较近的那一面的距离,far是离距离相机较远的那一面的距离,这六个投影面围成的区域就是相机投影的可见区域。 三维空间内,只有在这个区域内的物体才会被相机看到。
首先我们实例化一个相机正交相机对象,相机的默认坐标是原点,和立方体重叠无法看到立方体,这里我们设置一下相机的坐标(x,y,z)=(0,0,5)。
采用正交投影的时候,我们发现立方体的前端完全被后端遮盖了,这就是正交投影和透视投影的区别,如果使用透视投影,那么根据近大远小的原则,靠近摄像机的一端的投影面积小于远离相机一端的投影面积。
但是这里有一个很奇怪的问题,命名创建的是一个长度为1的正方体,为啥投影是长方体?这里canvas面板的长宽比是2:1,但是相机的(right-left)/(top-bottom)比例是4:3,因此 垂直方向上面被压缩了,所以显示的是一个长方体。
将(right-left)/(top-bottom)的比例同样调整为2:1
<div id="box" style="width: 400px;height: 200px;"></div>
camera = new THREE.OrthographicCamera(-2, 2, 1, -1, 1, 10);
这样就显示为正方体了。
var camera = new THREE.OrthographicCamera( width / - 2, width / 2, height / 2, height / - 2, 1, 1000 );
scene.add( camera );
构造器
OrthographicCamera( left : Number, right : Number, top : Number, bottom : Number, near : Number, far : Number )
- left — 摄像机视锥体左侧面。
- right — 摄像机视锥体右侧面。
- top — 摄像机视锥体上侧面。
- bottom — 摄像机视锥体下侧面。
- near — 摄像机视锥体近端面。
- far — 摄像机视锥体远端面。
这些参数一起定义了摄像机的viewing frustum(视锥体)。
属性
请参阅其基类Camera来查看其共有属性。 请注意,在大多数属性发生改变之后,你将需要调用.updateProjectionMatrix来使得这些改变生效。
- .bottom : Float
摄像机视锥体下侧面。
- .far : Float
摄像机视锥体远端面,其默认值为2000。 其值的有效范围介于near(摄像机视锥体近端面)和无穷大之间。
- .isOrthographicCamera : Boolean
用于测试这个类或者派生类是否为OrthographicCameras,默认为true。 你不应当对这个属性进行改变,因为它在内部由渲染器使用,以用于优化。
- .left : Float
摄像机视锥体左侧面。
- .near : Float
摄像机视锥体近端面。其默认值为0.1. 其值的有效范围介于0和far(摄像机视锥体远端面)之间。 请注意,和PerspectiveCamera不同,0对于OrthographicCamera的近端面来说是一个有效值。
- .right : Float
摄像机视锥体右侧面。
- .top : Float
摄像机视锥体上侧面。
- .view : Object
这个值是由setViewOffset来设置的,其默认值为null。
- .zoom : number
获取或者设置摄像机的缩放倍数,其默认值为1。
方法
请参阅其基类Camera来查看其共有方法。
- .setViewOffset ( fullWidth : Float, fullHeight : Float, x : Float, y : Float, width : Float, height : Float ) : null
- fullWidth — 多视图的全宽设置
- fullHeight — 多视图的全高设置
- x — 副摄像机的水平偏移
- y — 副摄像机的垂直偏移
- width — 副摄像机的宽度
- height — 副摄像机的高度
在较大的viewing frustum(视锥体)中设置偏移量,对于多窗口或者多显示器的设置是很有用的。 对于如何使用它,请查看PerspectiveCamera中的示例。
- .clearViewOffset () : null
清除任何由.setViewOffset设置的偏移量。
- .updateProjectionMatrix () : null
更新摄像机投影矩阵。在任何参数被改变以后必须被调用。
- .toJSON () : JSON
使用JSON格式来返回摄像机数据。
透视相机(PerspectiveCamera)
这一摄像机使用perspective projection)(透视投影)来进行投影。 这一投影模式被用来模拟人眼所看到的景象,它是3D场景的渲染中使用得最普遍的投影模式。
https://en.wikipedia.org/wiki/Perspective_(graphical)
查看源码
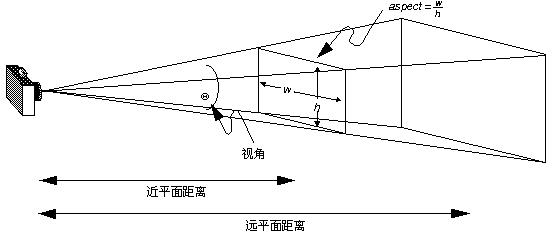
透视图中,灰色的部分是视景体,是可能被渲染的物体所在的区域。fov是视景体竖直方向上的张角(是角度制而非弧度制),如侧视图所示。
aspect等于width / height,是照相机水平方向和竖直方向长度的比值,通常设为Canvas的横纵比例。
near和far分别是照相机到视景体最近、最远的距离,均为正值,且far应大于near。
//初始化照相机
function initCamera() {
camera = new THREE.PerspectiveCamera(45, 400 / 200, 1, 10);
//定义camera的位置
camera.position.set(0, 0, 5);
//将camera添加到scene中
scene.add(camera);
}
fov设为45度。
现在,我们来看下fov的改变对渲染效果的影响。我们将原来的45改为60 ,正方体显得更小了 ?
我们从下面的侧视图来看,虽然正方体的实际大小并未改变,但是将照相机的竖直张角设置得更大时,视景体变大了,因而正方体相对于整个视景体的大小就变小了,看起来正方形就显得变小了。
注意,改变
fov并不会引起画面横竖比例的变化,而改变aspect则会改变横竖比例。
var camera = new THREE.PerspectiveCamera( 45, width / height, 1, 1000 );
scene.add( camera );
构造器
PerspectiveCamera( fov : Number, aspect : Number, near : Number, far : Number )
- fov — 摄像机视锥体垂直视野角度
- aspect — 摄像机视锥体长宽比
- near — 摄像机视锥体近端面
- far — 摄像机视锥体远端面
这些参数一起定义了摄像机的viewing frustum(视锥体)。
属性
请参阅其基类 Camera 来查看共有属性。 请注意,在大多数属性发生改变之后,你将需要调用.updateProjectionMatrix来使得这些改变生效。
- .aspect : Float
摄像机视锥体的长宽比,通常是使用画布的宽/画布的高。默认值是1(正方形画布)。
- .far : Float
摄像机的远端面,默认值是2000。 其有效值范围是在当前摄像机near plane(近端面)的值到无穷远之间。
- .filmGauge : Float
胶片尺寸,其默认值为35(毫米)。 这个参数不会影响摄像机的投影矩阵,除非.filmOffset被设置为了一个非零的值。
- .filmOffset : Float
水平偏离中心偏移量,和.filmGauge单位相同。默认值为0。
- .focus : Float
用于立体视觉和景深效果的物体的距离。 这个参数不会影响摄像机的投影矩阵,除非使用了StereoCamera。 默认值是10。
- .fov : Float
摄像机视锥体垂直视野角度,从视图的底部到顶部,以角度来表示。默认值是50。
- .isPerspectiveCamera : Boolean
用于测试这个类或者派生类是否为PerspectiveCameras,默认为true。
你不应当对这个属性进行改变,因为它在内部由渲染器使用,以用于优化。
- .near : Float
摄像机的近端面,默认值是0.1。
其有效值范围是0到当前摄像机far plane(远端面)的值之间。
请注意,和OrthographicCamera不同,0对于PerspectiveCamera的近端面来说不是一个有效值。
- .view : Object
Frustum window specification or null. 这个值使用.setViewOffset方法来进行设置,使用.clearViewOffset方法来进行清除。
- .zoom : number
获取或者设置摄像机的缩放倍数,其默认值为1。
方法
请参阅其基类Camera来查看共有属性。
- .clearViewOffset () : null
清除任何由.setViewOffset设置的偏移量。
- .getEffectiveFOV () : Float
结合.zoom(缩放倍数),以角度返回当前垂直视野角度。
- .getFilmHeight () : Float
返回当前胶片上图像的高,如果.aspect小于或等于1(肖像格式、纵向构图),则结果等于.filmGauge。
- .getFilmWidth () : Float
返回当前胶片上图像的宽,如果.aspect大于或等于1(景观格式、横向构图),则结果等于.filmGauge。
- .getFocalLength () : Float
返回当前.fov(视野角度)相对于.filmGauge(胶片尺寸)的焦距。
- .setFocalLength ( focalLength : Float ) : null
通过相对于当前.filmGauge的焦距,设置FOV。 默认情况下,焦距是为35mm(全画幅)摄像机而指定的。
.setViewOffset ( fullWidth : Float, fullHeight : Float, x : Float, y : Float, width : Float, height : Float ) : null
- fullWidth — 多视图的全宽设置
- fullHeight — 多视图的全高设置
- x — 副摄像机的水平偏移
- y — 副摄像机的垂直偏移
- width — 副摄像机的宽度
- height — 副摄像机的高度
在较大的viewing frustum(视锥体)中设置偏移量,对于多窗口或者多显示器的设置是很有用的。
例如,如果你有一个3x2的显示器阵列,每个显示器分辨率都是1920x1080,且这些显示器排列成像这样的网格:
+---+---+---+
| A | B | C |
+---+---+---+
| D | E | F |
+---+---+---+
那对于每个显示器,你可以这样来设置、调用:
var w = 1920;
var h = 1080;
var fullWidth = w * 3;
var fullHeight = h * 2;
// A
camera.setViewOffset( fullWidth, fullHeight, w * 0, h * 0, w, h );
// B
camera.setViewOffset( fullWidth, fullHeight, w * 1, h * 0, w, h );
// C
camera.setViewOffset( fullWidth, fullHeight, w * 2, h * 0, w, h );
// D
camera.setViewOffset( fullWidth, fullHeight, w * 0, h * 1, w, h );
// E
camera.setViewOffset( fullWidth, fullHeight, w * 1, h * 1, w, h );
// F
camera.setViewOffset( fullWidth, fullHeight, w * 2, h * 1, w, h );
请注意,显示器的不必具有相同的大小,或者不必在网格中。
更新摄像机投影矩阵。在任何参数被改变以后必须被调用。
- .toJSON () : JSON
使用JSON格式来返回摄像机数据。
立体相机(StereoCamera)
双透视摄像机(立体相机)常被用于创建3D Anaglyph(3D立体影像)或者Parallax Barrier(视差效果)。
查看源码
构造器
StereoCamera( )
属性
.aspect : Float 默认值是1.
.eyeSep : Float 默认值是0.064.
.cameraL : PerspectiveCamera 左摄像机,它被加入到了layer 1中 —— 需要被左摄像机渲染的物体也应当要加入到这一层中。
.cameraR : PerspectiveCamera 右摄像机,它被加入到了layer 2中 —— 需要被右摄像机渲染的物体也应当要加入到这一层中。
方法
- .update ( camera : PerspectiveCamera ) : null 基于摄像机通过场景,更新立体摄像机。
摄像机阵列(ArrayCamera)
ArrayCamera 用于更加高效地使用一组已经预定义的摄像机来渲染一个场景。这将能够更好地提升VR场景的渲染性能。
一个 ArrayCamera 的实例中总是包含着一组子摄像机,应当为每一个子摄像机定义bound(边界)这个属性,这一属性决定了由该子摄像机所渲染的视口区域的大小。
查看源码
构造函数
ArrayCamera( array : Array ) 一个包含多个摄像机的数组。
属性
请参阅基类PerspectiveCamera的公共属性。
- .cameras : Array 摄像机数组。
方法
请参阅基类PerspectiveCamera的公共方法。